LLM Training vs Serving in Terms of Memory Access Patterns
This article investigates differences of LLM training vs serving in terms of memory access patterns.
LLM serving means allowing the users to send generation requests. LLM generation involves multiple inference steps. After each step a token is generated. The generated token is appended to input prompt which is used as the input in the next step. This process is referred as auto regressive decoding.
For the sake of simplicity this article focus on single GPU case.
Purpose
Let $V$ be the vocabulary of all possible tokens. Let a sequence of tokens be $x_{1:t}=(x_1,x_2,…,x_t)$, where $x_i∈V$. The LLM outputs a probability mass function (PMF) over all possible next tokens conditioned on the input sequence:
\[P(x_{t+1}=x \mid x_1,x_2,…,x_t)\]for all $x∈V$.
Using this PMF, it is possible to calculate $P(x_{t+1} \mid x_1,x_2,…,x_t)$ which gives probability of outputting token $x_{t+1}$ given the previous tokens $x_{1:t}$
An LLM consists of multiple layers of transformers which are bunch of matrices. The purpose of the training process is to find values of matrix elements such that the LLM can output PMFs that are close to actual language.
The purpose of the inference is to produce a PMF for a given input sequence. The PMF can be used to sample the next token.
Please note that inference does not yield a text completion. Decoding process yields the text completion. Decoding process involves multiple inference runs.
Objectives
During training, massive amounts of text is consumed. Training throughput is defined as amount of tokens consumed during training. It is important to achieve maximum throughput possible. This ensures high GPU utilization and low total training time. Low throughput on the other hand leads to longer training times and higher costs.
During serving, throughput also matters. Serving throughput is defined as amount of tokens produced. It is important to have high GPU utilization for cheaper serving. Latency is defined as total time waited to obtain a completion text for the input prompt.
During serving, requests can be interactive or batch-oriented. For interactive requests, latency is very important.
Attention Calculation
Scaled dot-product attention:
$Attention(Q, K, V) = softmax(\frac{Q K^T}{\sqrt{d_k}})V $
Where:
- $Q = x W^Q$ -> (Dimensions: Batch Size (B) x Sequence Length (T) x Hidden Dimension (D))
- $K = x W^K$ -> (B x T x D)
- $V = x W^V$ -> (B x T x D)
In python:
## Forward function for training
# x.shape -> (B, T, D)
q = self.query(x) # -> shape: (B, T, D)
k = self.key(x) # -> shape: (B, T, D)
v = self.value(x) # -> shape: (B, T, D)
att = (q @ k.transpose(-2, -1)) # -> (B, T, D) * (B, D, T) -> (B, T, T)
att = att * (1.0 / math.sqrt(k.size(-1))) # scale
att = F.softmax(att, dim=-1)
y = att @ v # (B, T, T) x (B, T, D) -> (B, T, D)
Training
During training the data is readily available. Once a batch is finished, the processing of the next batch immediately begins. All batches are in the same shape, meaning they have the same batch size (B) and sequence length (T). Attention is calculated for all input tokens which has $O(T^2)$ complexity. Each of the T tokens performs attention over all previous tokens.
During serving, input data may not be readily available. Request sizes can vary significantly. GPU requires processed batches to be of the same length. If different, they are left padded to the maximum input size in the batch.
Inference
Source [2]
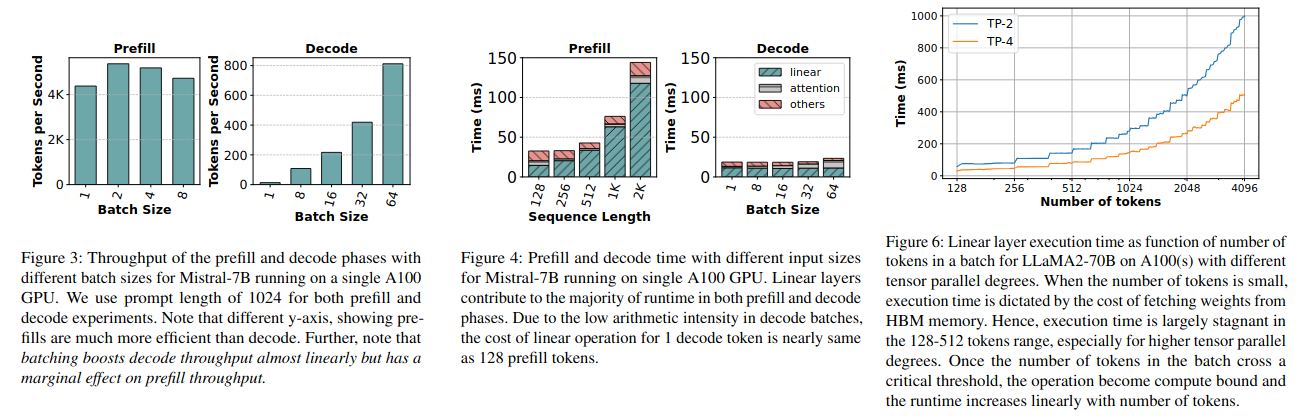
Generation has two distinct phases: prefill and decode.
During prefill phase, attention over the whole sequence is calculated where each token attends to all previous tokens in the sequence. Prefill phase is compute bound with $O(T^2)$ complexity, similar to how attention is calculated during training. Unlike training, K and V matrices are stored in so called KV cache to be used in decoding phase.
Decode phase involves multiple decode steps. K and V values are only calculated for the last token. K and V values for the past tokens are retrieved from the KV cache.
## Forward function for decoding
# x.shape -> (B, 1, D)
q = self.query(x) # -> shape: (B, 1, D)
k = self.key(x) # -> shape: (B, 1, D)
v = self.value(x) # -> shape: (B, 1, D)
# add newly calculated matrices to the cache
self.cache_k[:bsz, cur_pos : cur_pos + 1] = k
self.cache_v[:bsz, cur_pos : cur_pos + 1] = v
k = self.cache_k[:bsz, : cur_pos + 1] # get all past keys
v = self.cache_v[:bsz, : cur_pos + 1] # get all past values
att = (q @ k.transpose(-2, -1)) # -> (B, 1, D) * (B, D, T) -> (B, 1, T)
att = att * (1.0 / math.sqrt(k.size(-1))) # scale
att = F.softmax(att, dim=-1)
y = att @ v # (B, 1, T) x (B, T, D) -> (B, 1, D)
For decoding attention formulation can be expressed in the following terms:
$Attention(Q_t, K_{1:t}, V_{1:t}) $
This formulation provides a hint on why key and values are cached but not queries.
While the math during decoding phase is similar, its complexity is $O(T)$. Each new token only needs to attend to previous tokens. Since less calculations are done, unlike prefill phase, decode phase is memory bound.
Memory Transfer
Matrix multiplication is done in tensor cores. Tensor cores need the tensors to be transferred from HBM memory to shared memory.
A GPU has two main resources: FLOPS and Memory Bandwidth. FLOPS is the amount of floating point operations can be done while bandwidth determines amount of data that can be transferred from/to shared memory. A nice thing about the GPU is that it is possible to overlap computation and transfer. It is possible to transfer next weights while doing multiplication in tensor cores.
If tensor cores have very few computations to make they become idle until next weights are transferred. In this case the operation is said to be memory bound. If tensor cores have a lot of computations to make they will not be able to process next weights even if their transfer is completed. In this case the operation is said to be compute bound. The optimal case is where computation in tensor cores and memory transfer is completed at the same time.
The optimal batch size can help the balance the computation and transfer time to achieve high GPU utilization thus high throughput.
Training and Prefill operations are compute bound. They can utilize GPU well. However, decode operation is memory bound. Without proper batching GPU utilization will be low, the time will be spent on waiting weights to be transferred. GPU flops will be wasted. While this is acceptable in terms of latency, it is not desirable in terms of throughput and cost of inference.
Memory Usage
Training
LLM Training is an optimization process. Involves two passes: forward pass and backward pass.
During the forward pass, activations are calculated and saved for backward pass. At the end of the forward pass the loss is calculated.
During the backward pass, training uses the chain rule of calculus to compute the gradient of the loss with respect to model parameters. This requires activations:
$ \frac{\partial L}{\partial \theta} = \frac{\partial L}{\partial a} . \frac{\partial a}{\partial \theta} $
Where: - L is the loss - a is the activation (output of some layer) - θ is a parameter (e.g., a weight)
Optimizer uses the gradients to update model weights. Optimizers have their own internal states for each weight. For example AdamW optimizer keeps two state variables: mean and variance of the past gradients.
AdamW Update Rule:
$\theta \gets \theta - η \frac{m_t}{\sqrt{v_t}} - \lambda . \theta $
Where:
- η: learning rate
- $m_t$: first moment estimate (mean of gradients)
- $v_t$: second moment estimate (variance of gradients)
- λ: weight decay (L2 regularization)
So during training, GPU memory is used by model weights, activations, gradients and optimizer states.
param_mem = N_params × 2 # usually stored in fp16/bf16
# B = batch size
# L = number of layers
# D = model hidden dimension
# factor = accounts for intermediate activations (usually 3–5× for attention, MLP, etc.)
activation_memory ≈ B × L × D × N_layers × dtype_size × factor
grad_mem = N_params × 4 bytes # usually stored in fp32
opt_state_mem = N_params × 2 × 4 bytes # usually stored in fp32, Adam keeps two states
total_mem ≈ param_mem + activation_mem + grad_mem + opt_state_mem
Inference
During LLM inference only forward pass is invoked. Since backward pass is not invoked, states used during backward pass are not needed e.g. activations, optimizer states, gradients. LLM inference uses KV cache to avoid recomputation of key and values during subsequent decoding steps.
param_mem = N_params × 2 # usually stored in fp16/bf16
# D = hidden dimension
# L = number of layers
# 2 bytes for each value (fp16/bf16)
# 2 for K and V
kv_mem = 2 x 2 x B x T x D x L
total_mem ≈ param_mem + kv_mem
References
2- Taming Throughput-Latency Tradeoff in LLM Inference with Sarathi-Serve
3- Matrix multiplication with Tensor Cores
4- Simple Attention Implementation